    |

 |
|  | ||||||||||||||||||||||||||||||||||||||||||||||
Noticias | Ingenierías | IngenierĂa RobĂłticaCrean robots autónomos que trabajan en equipo para explorar otros planetasEl paradigma de las exploraciones llevadas a cabo por robots en otros planetas está a punto de cambiar, afirma un físico llamado Wolfgang Fink que trabaja en uno de los laboratorios del Instituto Tecnológico de California (Caltech) en Pasadena, en un artículo publicado por el Jet Propulsion Laboratory de la NASA. Publicado: Viernes, 30/10/2009 - 21:26 | 2607 visitas.
Según Fink, en lugar de enviar un único vehículo espacial robótico dirigido desde la Tierra a planetas como Marte, en el futuro se enviarán múltiples robots de bajo coste, que se auto-dirigirán o que dirigirán a otros robots y que se colocarán en diversas localizaciones al mismo tiempo. Las próximas misiones de exploración las realizarán, por tanto, ejércitos de robots autónomos. Para ello Fink y sus colabores del Caltech, están desarrollando un programa informático y han creado un dispositivo de experimentación capaz de trabajar de forma independiente, y también como parte de un gran equipo. Este software hará posible que los robots piensen por sí solos, identifiquen problemas y posibles peligros, determinen áreas de interés y prioricen objetivos de análisis. Tecnología integrada En las exploraciones actuales, los ingenieros ordenan a un vehículo explorador que realice ciertas tareas, y luego esperan a que éstas sean ejecutadas. Esta forma de funcionar deja poco margen para la flexibilidad o el cambio de planes de acción, según se van desarrollando las misiones. Según se explicaba en otro comunicado anterior emitido por el Caltech, en el “nuevo paradigma” de exploración robótica, en cambio, los exploradores serán autónomos. Diversas tecnologías se lo permitirán, puesto que llevarán a bordo instrumentos ópticos y cámaras térmicas, radares de penetración terrestre, y sensores de gas y de humedad, gracias a los cuales podrán elegir por sí solos las áreas del planeta a investigar. Asimismo, los robots contarán con un software de identificación, caracterización e integración de varios tipos de información espacial y temporal, para la realización de análisis comparativos en tránsito, para la formulación de hipótesis, y para la selección de objetivos. Por tanto, el control de las misiones no se llevará a cabo desde la Tierra, sino que lo tendrán múltiples robots que trabajarán en conjunto, compartiendo entre ellos la información que cada uno de ellos recopile, de manera casi simultánea. Este tipo de exploraciones será aplicada algún día en misiones a Titán (satélite más grande del planeta Saturno), a Marte o a otros planetas.
| NoticiasImágenes
Videos
ArtículosEntradasLibros
| |||||||||||||||||||||||||||||||||||||||||||||||


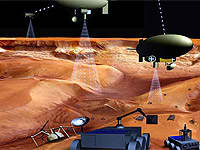
 Imagen: NASA
Imagen: NASA



