    |

 |
|  | ||||||||||||||||||||||||||||||||||||||||||||||
Noticias | Ingenierías | IngenierĂa RobĂłticaCrean un microrobot volador que se mueve gracias a la levitación magnéticaUn equipo de ingenieros de la Universidad de Waterloo, en Canadá, ha desarrollado el primer microrobot volador del mundo capaz de manipular objetos para aplicaciones a microescala. Publicado: Jueves, 16/4/2009 - 15:16 | 2340 visitas.
Este nuevo desarrollo proporcionará a investigadores de muchos campos más control en medios diminutos, permitiĂ©ndoles mover de sitio pequeños objetos con mucha más precisiĂłn. Manipular objetos de semejante tamaño resulta complejo para los seres humanos habitualmente, por eso la tecnologĂa ahora presentada es tan importante.
La idea partiĂł de Behrad Khamesee, que es el director del Maglev Microrobotics Laboratory, perteneciente a la citada Universidad. Él, junto a un grupo de ingenieros, han conseguido fabricar este primer prototipo volador. El nanodispositivo desafĂa la fuerza de la gravedad volando o levitando empujado por un campo magnĂ©tico. Es capaz de moverse y manipular objetos con una destreza sorprendente gracias a unos imanes adosados a unas micropinzas. El robot es controlado remotamente con un haz de rayo láser. De alguna manera, su funcionamiento es parecido al que ya se usa en los trenes de levitaciĂłn. Un tren de levitaciĂłn magnĂ©tica, o maglev, es un tren suspendido en el aire por encima de una vĂa, siendo propulsado hacia adelante por medio de las fuerzas repulsivas y atractivas del magnetismo. Este mĂ©todo tiene el potencial de ser rápido en comparaciĂłn con otros sistemas de transporte masivos con ruedas. Micro manipular SegĂşn sus creadores puede ser usado para micromanipular, una tĂ©cnica que permite posicionar de un modo muy preciso objetos micro. Algunas de las aplicaciones de la micromanipulaciĂłn son ensamblar componentes, manipular muestras biolĂłgicas o incluso llevar a cabo operaciones de microcirugĂa. “Hemos desarrollado un microrobot que levita magnĂ©ticamente, que es una nueva tecnologĂa para la manipulaciĂłn usando microrobots voladores”, comenta Khamesee, que lleva años especializado en crear pequeños dispositivos usando la levitaciĂłn magnĂ©tica, en un comunicado. SegĂşn sus creadores han sido los primeros en el mundo capaces de fabricar un robot equipado con micropinzas. Gracias a ellas pueden entrar virtualmente en cualquier espacio y operar en un sitio dado gracias a una persona situada lejos de dicho lugar. Esta caracterĂstica hace que el dispositivo ahora presentado sea muy Ăştil para manipular, por ejemplo, materiales peligrosos o para trabajar en cámaras de vacĂo o esterilizadas. La levitaciĂłn magnĂ©tica se usa para posicionar el microrobot en un espacio tridimensional, empleando un mecanismo magnĂ©tico de direcciĂłn externo. Este mecanismo controla el campo magnĂ©tico usando las indicaciones de unos sensores de posiciĂłn que, precisamente, sitĂşan al microrobot en el lugar elegido.
| NoticiasImágenes
Videos
ArtículosEntradasLibros
| |||||||||||||||||||||||||||||||||||||||||||||||


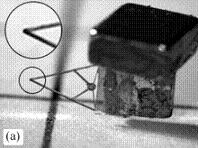
 Imagen: Agencias / Internet
Imagen: Agencias / Internet



