    |

 |
|  | ||||||||||||||||||||||||||||||||||||||||||||||
Noticias | Ingenierías | IngenierĂa RobĂłticaDesarrollan un robot que captura objetivos en movimientoIngenieros de las Universidades de Duke y Nuevo MĂ©xico se han inspirado en un popular juego que practican los niños en la piscina para desarrollar un sistema que permita a robots en movimiento detectar y capturar otros objetivos en movimiento. Publicado: Martes, 31/3/2009 - 9:1 | 2054 visitas.
En concreto han usado un juego de persecuciĂłn y evasiĂłn llamado “Marco Polo” para resolver un problema complejo: cĂłmo crear un sistema que permita a los robots no sĂłlo “sentir” otros objetivos en movimiento, sino tambiĂ©n interceptarlos. Esta tecnologĂa tendrĂa muchas aplicaciones, desde sistemas de seguridad, seguimiento de intrusos no deseados, como barcos enemigos, creaciĂłn de mapas de peligros medioambientales o el seguimiento de especies en peligro de extinciĂłn. El reto al que se tienen que enfrentar los investigadores es crear la inteligencia artificial para controlar los robots y sus sensores sin la intervenciĂłn directa del ser humano. El juego “Marco Polo” es una especie de gallinita ciega, pero en el agua. En Ă©l, el que pilla debe gritar "Marco" y los que escapan deben gritar "Polo" y si, en algĂşn momento, el que pilla dice "¡Fuera!" es quien está fuera de la piscina el que tiene que empezar a pillar. Con este procedimiento, los perseguidores pueden estimar en cada momento dĂłnde se encuentran sus objetivos y hacia dĂłnde se podrĂan dirigir. Visualizar problemas complejos “Los juegos nos proporcionan una manera de visualizar de un modo sencillo problemas complejos”, comenta Silvia Ferrari, que es profesora asistente de ingenierĂa mecánica y ciencia de los materiales en la Escuela Pratt de IngenierĂa de la Universidad de Duke, en un comunicado. Ferrari y su colega Rafael Fierro de la Universidad de Nuevo MĂ©xico han publicado los resultados de sus Ăşltimos experimentos en SIAM Journal on Control and Optimization. Tal y como ocurre en el citado juego, los ingenieros han tenido que crear un modo que permita a robots en movimiento detectar otros objetos en movimiento y hacer una predicciĂłn de hacia dĂłnde se pueden dirigir. “Si se hace eficientemente, los sensores mĂłviles pueden cambiar del modo “perseguir” al modo “capturar” lo más rápidamente posible. El laboratorio de Ferrari habĂa desarrollado ya un tipo de algoritmo similar. Asimismo, experimentos previos habĂan conseguido que un robot pudiera moverse a travĂ©s de un espacio determinado sin chocarse con obstáculos inmĂłviles. Los Ăşltimos experimentos han incluido no sĂłlo robots equipados con sensores, sino sensores parados, de tal modo que es posible cubrir todo un espacio dado. “La idea es que mĂşltiples sensores estĂ©n desplegados en un espacio para detectar de un modo cooperativo objetivos en movimiento dentro de ese espacio”, comenta Ferrari. Cuantas más detecciones hagan los sensores, mejor se podrá predecir el camino que seguirá un intruso, por ejemplo.
| NoticiasImágenes
Videos
ArtículosEntradasLibros
| |||||||||||||||||||||||||||||||||||||||||||||||


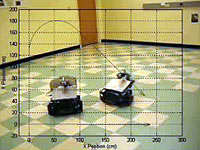
 Imagen: Universidad de Duke
Imagen: Universidad de Duke



